





Engineered to Excel
Advanced robotics and intelligent sensing meet robust mobility in PR-OMNI—built for performance.


Max Height: 5feet 2inches
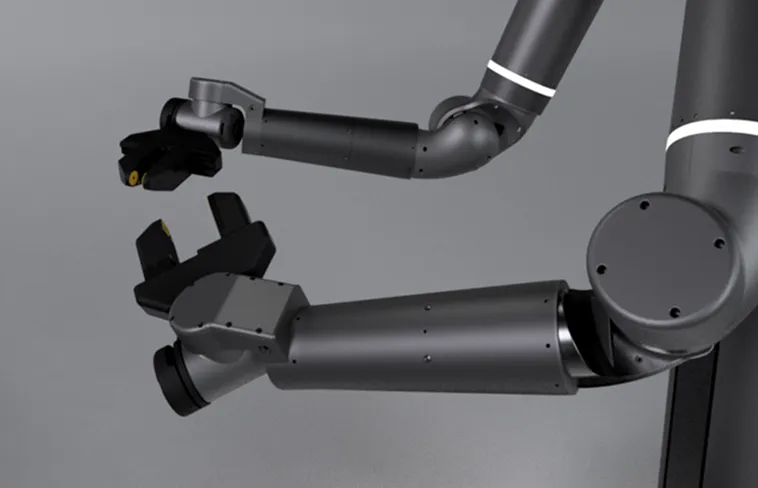
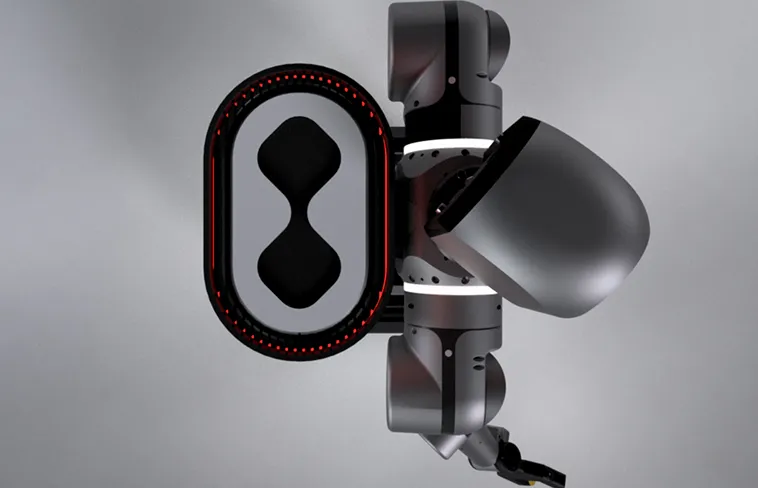
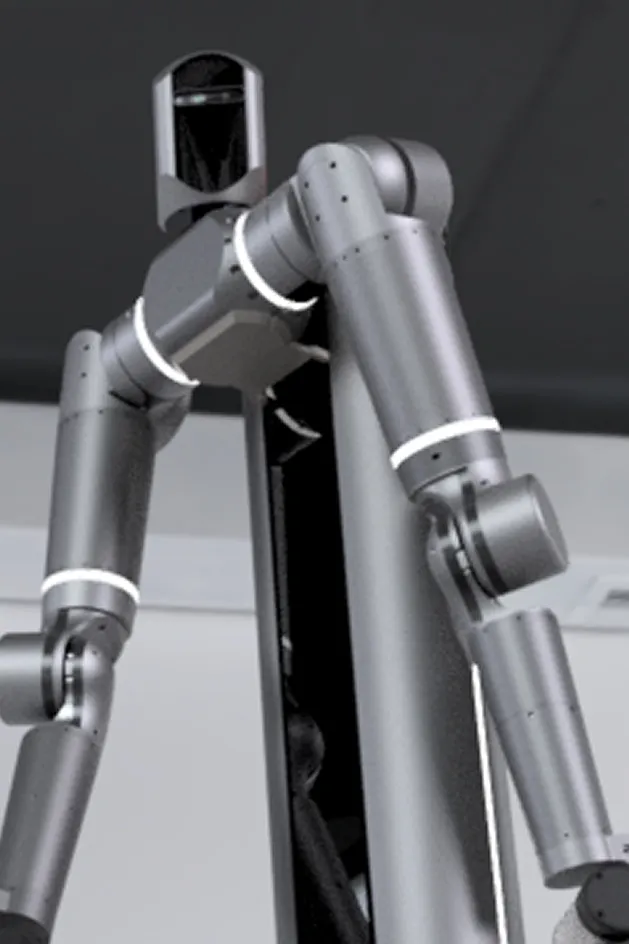
Torque Sensing at every joint


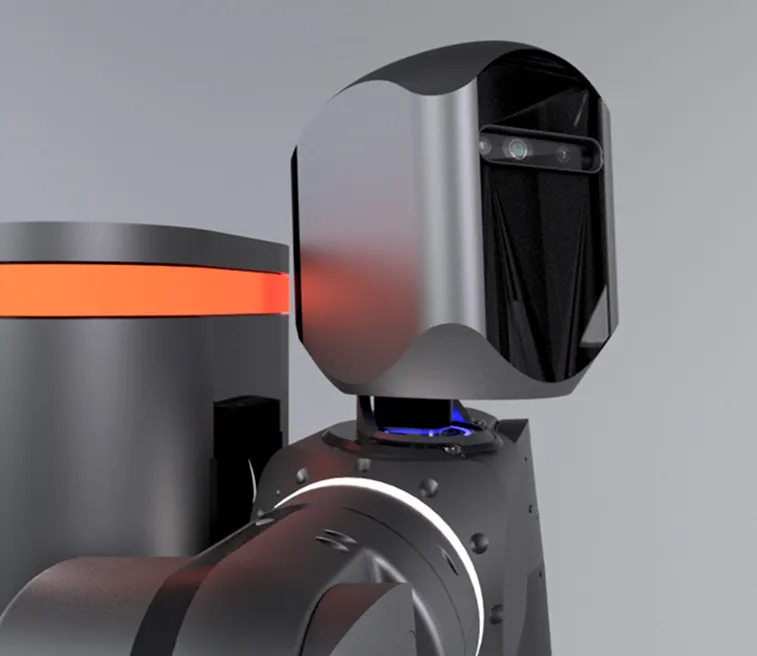
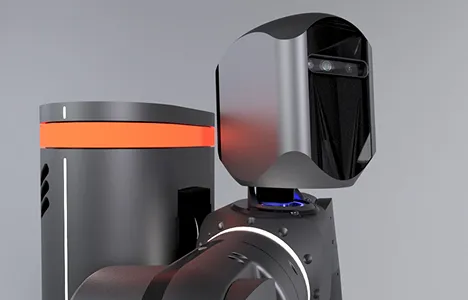
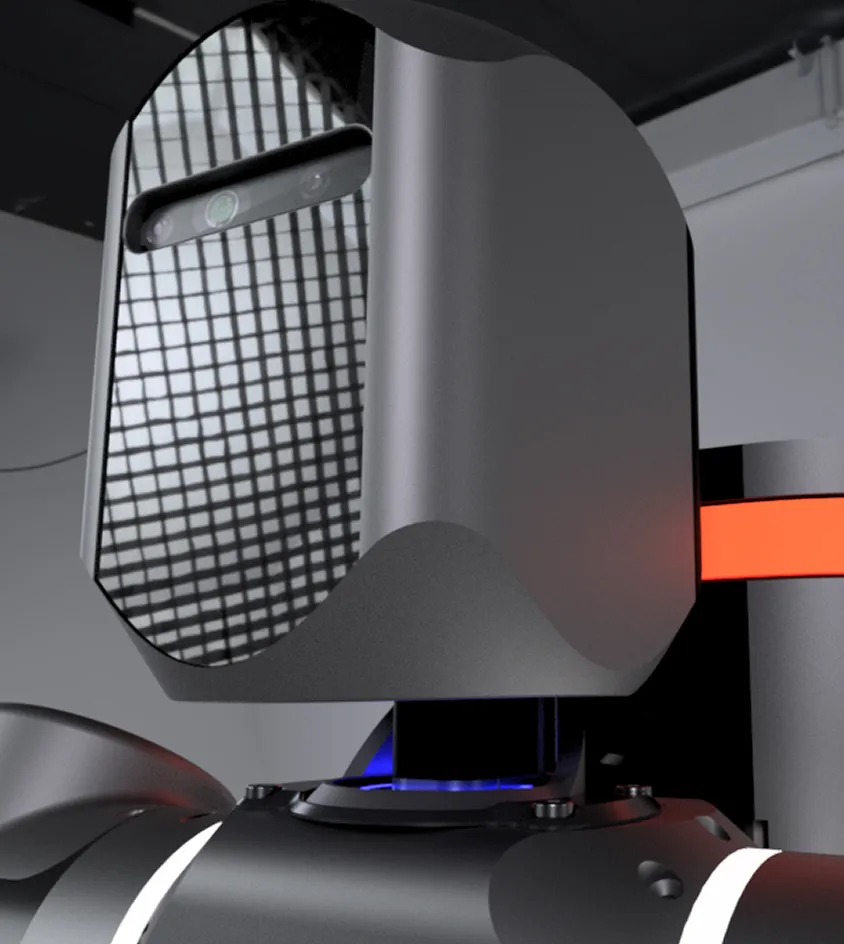
2 DOF head


2 DOF head
Torque Sensing at every joint

Torque Sensing at every joint
Torque Sensing at every joint
Crafted to move effortlessly; smart, versatile, and consistently dependable in every environment and situation.
Intelligent Foundations
Energy, compute, and motion unite to enable autonomy, adaptability, and sustained operation.

Battery type:
Li-ion , 1.5kWh X 2, Swappable


Compute:
Nvidia Jetson Orin , Intel NUC – 5th Gen
Electronic Braking, No Mechanical Brake
Max speed: 2 m/s

Drive type: Holonomic drive
Navigation: Indoor SLAM with 2 LIDARs
/Specifications
Here’s where you’ll find PR-OMNI’s complete DNA; every spec and feature that makes it powerful, adaptable, and future-ready.
Core Build
Height
5’2”
Weight
120 kg
Body Material
Aluminium
Design
Semi-human form factor, modular design
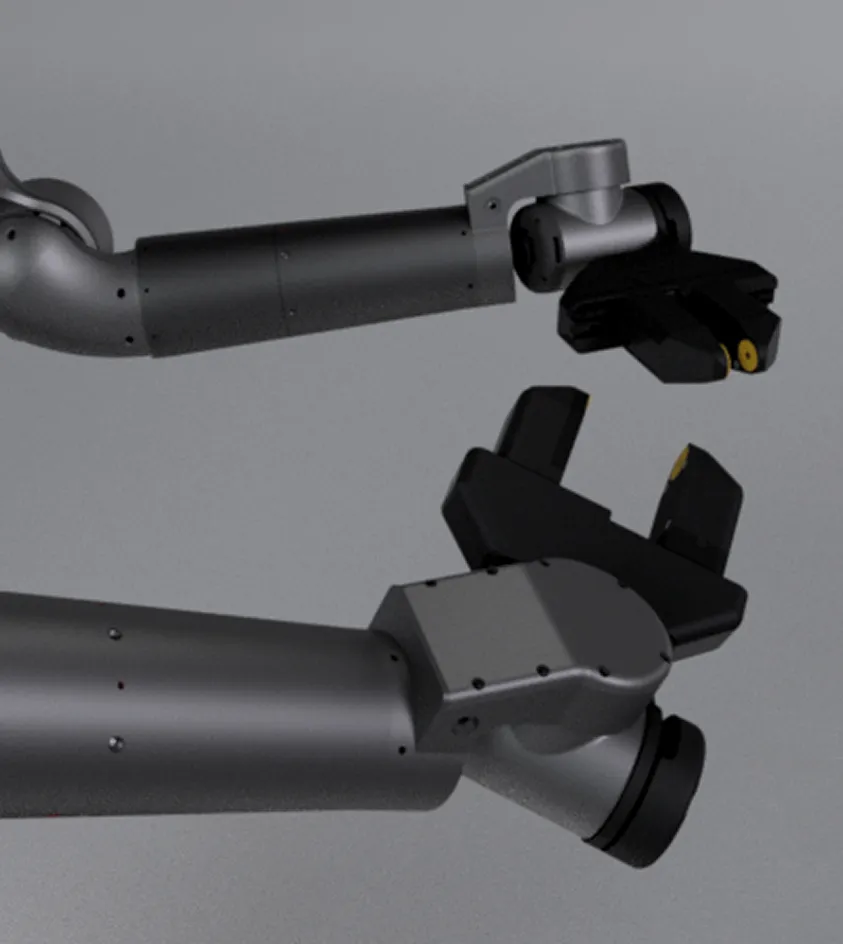
Arms
Dual arms, 7 DOF each
Arm Reach
780 mm
Head
2 DOF
Mobility
Drive Type
Holonomic drive
Max Speed
2 m/s
Braking
Electronic braking (no mechanical brake)
Navigation
Indoor SLAM with dual LIDARs
Base
Autonomous mobile base
Sensing & Intelligence
Joint Sensors
Force-torque sensing at every joint
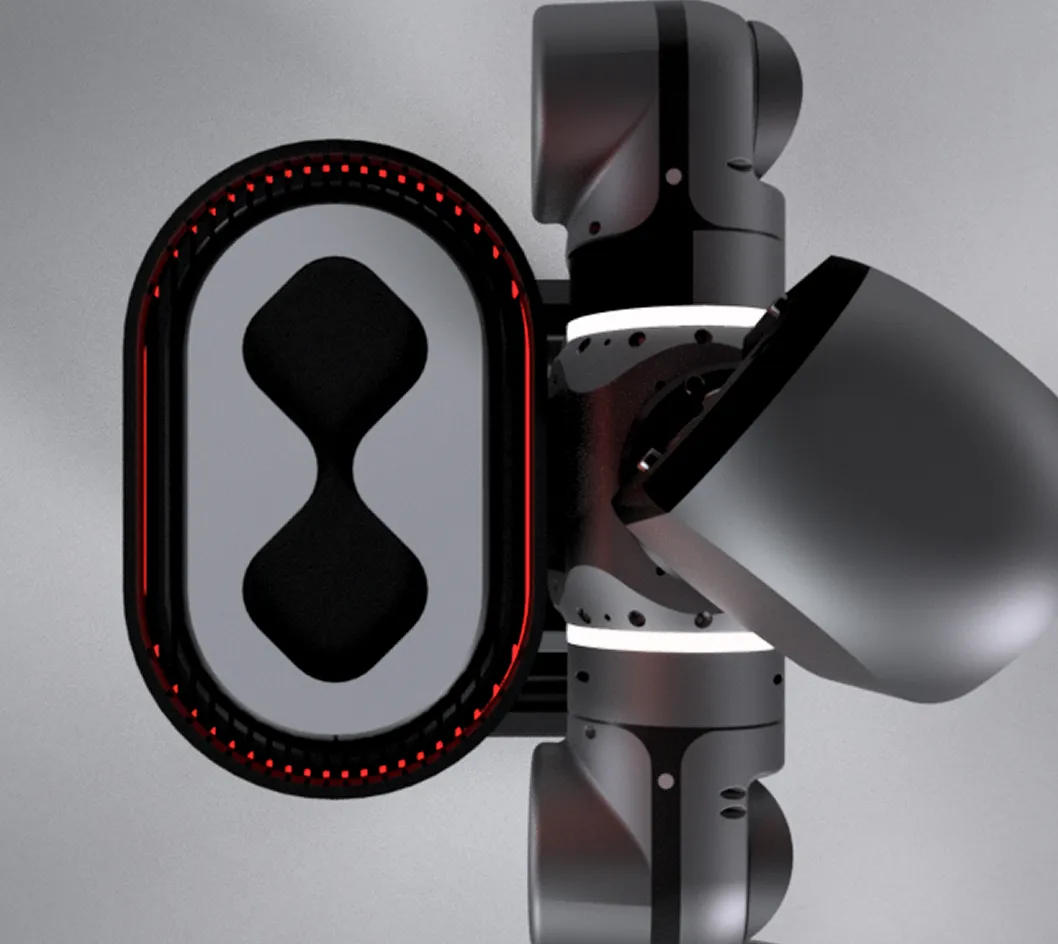
End-Effector Sensors
Tactile sensing
Vision
3 RGBD cameras
Visual Servo
Enabled
Technology Layer
Proprietary Physical Intelligence (PhI), supports open-source models
Performance & Power
Vertical Gantry Range
800 mm
Max Vertical Approach Speed
1 m/s
Runtime
6 hours
Battery Capacity
3 kWh (2 × 1.5 kWh, swappable)
Compute
Nvidia Jetson Orin + Intel NUC 5th Gen
Additional Features
Safety
Collision avoidance technology
Teleoperation
VR headset compatibility

